This project will satisfy a dream of mine that started almost as far back as I can remember.
Basic Capabilities and Description:
My goal is to build a large robot that will be totally remote controlled. It will be approximately 6’ tall with a cylinder shaped torso, two arms that each have a three finger claw, and a classic “bubble” head. This robot will be built to impress, so it must look sharp. It must emanate a presence when it enters a room.
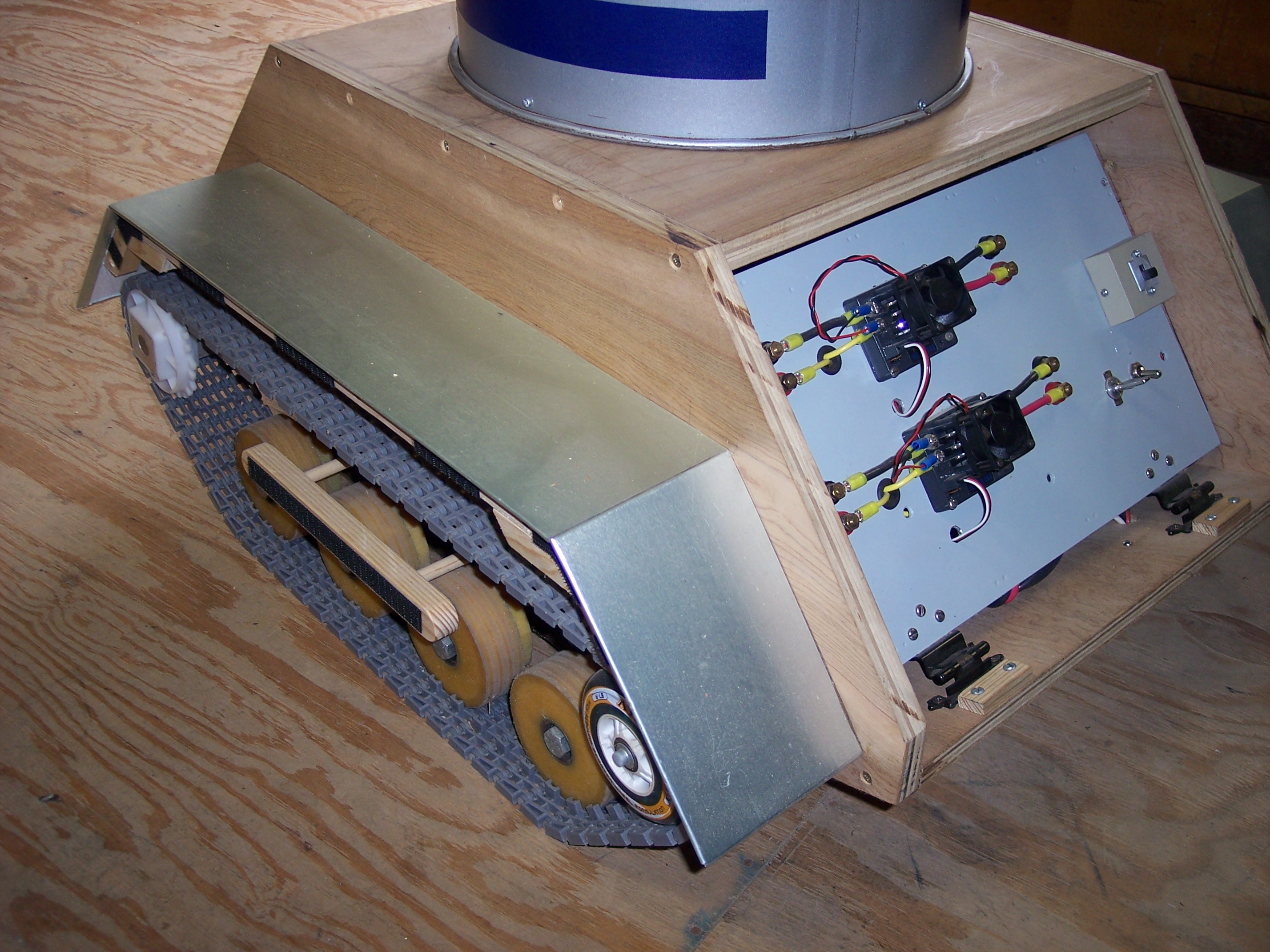
1. It will have a tank tread drive system.
2. It will have wireless video so it can be steered even when it is not in my direct line of sight.
3. It will have sensors that will keep it from bumping into objects or people. I still think it best to have an assistant that stays with the robot to help with the demonstration, show, act (whatever you might want to call it) and to keep people from touching it.
4. It will have two-way wireless audio communication so that I can carry on a conversation with others “through” the robot.
5. It will have a voice changer circuit or program that allows my voice to sound more “robotic” to make it seem or appear that the robot is operating on its own (with no one controlling it).

First stack-up. Can't wait to see how it will look with the final pait job.
Automatic Features
Certain aspects of the robot need to be automatic to allow me to control it more easily.
Examples include:
1. After the torso has been rotated left or right, have it automatically return to the center straight-ahead position.
2. Also perform this auto centering for the robot’s head.
3. After moving the robot’s arms to a particular position, have them “return to home” or a neutral position automatically. In some cases you may want one command to move both arms in an identical manner at the same time.
4. Collision avoidance should also be automatic.
5. Certain other aspects of the robot’s behavior need to respond to sound and motion stimuli in order to make its appearance more authentic.
6. The robot will have a “drop dead” feature if it gets out of radio control range. (If operation of the robot becomes unstable for some reason, it will have an emergency shut down feature that the assistant or I can activate via push button. )
Examples include:
1. After the torso has been rotated left or right, have it automatically return to the center straight-ahead position.
2. Also perform this auto centering for the robot’s head.
3. After moving the robot’s arms to a particular position, have them “return to home” or a neutral position automatically. In some cases you may want one command to move both arms in an identical manner at the same time.
4. Collision avoidance should also be automatic.
5. Certain other aspects of the robot’s behavior need to respond to sound and motion stimuli in order to make its appearance more authentic.
6. The robot will have a “drop dead” feature if it gets out of radio control range. (If operation of the robot becomes unstable for some reason, it will have an emergency shut down feature that the assistant or I can activate via push button. )

Base Platform with tread drive. Tested to 200 lb. payload.


Variable Speed Drive Panel.
The robot will also have a number of special effects to enhance its presence.
These will include:
1. Sound effects that give the impression that there are
mechanical and electronic processes that are taking place
inside the robot, a sort of low-level background noise.
2. Sound effects that enhance the movements of the robot's
body, arms, head, etc.
3. Voice lights that modulate or flicker as the robot speaks.
4. Various flashing lights on different parts of the body.
5. The ominous “cylon” eye that strobes back and forth.
6. Other lights that respond to outside stimuli such as sound
or motion.
7. Certain lights will actually be used to monitor or indicate
real robot status items (such as battery charge level).
No comments:
Post a Comment